TOWARDS AUTONOMOUS ROV OPERATIONS IN FISH FARMS – RECENT DEVELOPMENTS IN NAVIGATION AND CONTROL
Introduction
Operations with underwater robots such as remotely operated vehicles (ROVs) have become an important part of the aquaculture industry. Use cases includes net and mooring inspections, net cleaning, and biomass inspection during e.g., crowding operations. Though increasingly common in and around net pens , the potential of ROVs are not fully exploited today and several operations are still conducted using divers . The ROV is mainly used as a mobile camera and is controlled by an ROV pilot. The workload required by an ROV pilot can be demanding: T he pilot must control the ROV in a dynamically changing environment and make sure the ROV does not damage the net pen while simultaneously inspecting the video images. These workload challenges, and challenges related to weather conditions and costs can be mitigated through increased use of autonomy. SINTEF Ocean has through research projects such as CageReporter (RCN 269087), Artifex (RCN 256241) , Netclean 24/7 (RCN 296392) and SFI Exposed (RCN 237790) developed novel functions for autonomous navigation and robust control of underwater vehicles in net pens. This paper summarises some of the recent developments.
Materials and methods
Navigation u nder water is a challenging task as signals from global navigation satellite systems, e.g., GPS, does not penetrate the water column. Positioning systems based on acoustics, such as Ultra-short Baseline (USBL), and Dopple r Velocity Logs (DVLs) are instead often used. The USBL consists of a transponder that is mounted on the ROV and a transceiver that is placed on the surface support vessel. The transceiver interrogates the transponder to pinpoint its location by determining the bearing and elevation angles as well as the time of flight of the acoustic signal. T he DVL is mounted on the underwater vehicle and emits hydro acoustic beams . By calculating the Doppler shift in the returning beams, the speed relative to the seabed or any other fixed structure can be calculated.
One question was, however, how these systems would perform in a fish farm with hundreds of thousands of fish interfering with the signals. This was investigated in
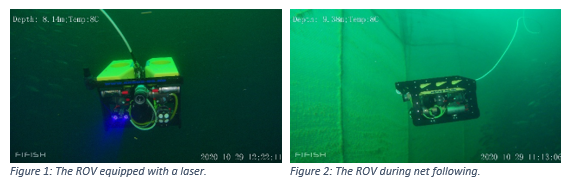
and it was found that the performance of the USBL was acceptable, with small levels of noise from acoustic interaction with the biomass when the transponder and transceiver were on different sides of the net pen. Furthermore, it was found that a DVL could be used to calculate the ROVs speed and position relative to the net, instead of the seabed, by facing the DVL in the forward direction. Some interference was experienced if fish passed between the ROV and the net, but this was mostly an issue if the ROV was more than 3 meters from the net. As such, net-relative manoeuvring using a DVL would be possible. A recent study investigated whether a DVL, which is a quite expensive instrument, could be replaced by a combination of less expensive lasers, and cameras
, see
. The results are very promising.
The measurements from the sensors are indispensable, but they are also prone to noise, drift, and lag which might render control systems unstable. Therefore, with the purpose of providing both the control systems and the operator with the best possible estimation of the ROV states, i.e., heading and position, model based sensor fusion techniques and filters such as the Kalman filter
are employed.
Most industrial ROVs are equipped auto-depth and auto-heading functions that make the ROV hold a given depth and yaw angle, respectively . Such features are very helpful, but more automatic functions are required if the ROV is to perform more advanced autonomous operations. One such example is d ynamic positioning (DP) that makes the ROV hold the desired position, and automatically compensates for the disturbances arising from e.g., ocean currents, hence avoiding drift . Another example is path following. Here, the low-level control system in the ROV is provided a desired course angle, depth, and speed from a higher-level path planning algorithm. Combinations of DP and path following algorithms are very useful during operations in fish farms as it allows the ROV to stop and hold its position if it e.g., detects a hole in the net.
Results
SINTEF Ocean has achieved a high level of autonomy within net pen navigation (autonomy level 3, according to
). This has been achieved by: (1) estimating the vehicle state with sensor fusion techniques such as the Kalman filter that combines compass measurements, gyro data, DVL measurements and USBL positions; (2) developing a control system for automatic net pen traversing
, see
; (3) developing a dynamic positioning control system for station keeping purposes. The systems have been successfully tested at the SINTEF ACE laboratory; a full-scale industrial fish farm laboratory owned by SINTEF Ocean.
Conclusion and future work
New autonomous functions are being implemented on ROVs operating in fish farms. These novel solutions can ensure better working conditions for ROV operators and can , if combined with e.g., machine vision algorithms, become a vital tool for fish farmers worldwide, aiding in the detection of holes and thus reducing risks of fish escaping. The ROVs can also be equipped with manipulator arms and thus aid in underwater maintenance and intervention operations. SINTEF Ocean is also conducting research into the interaction between fish and machines to develop control and navigation solutions that are preserving fish welfare. The overall goal is to achieve autonomy level 4 within the next 3 years
.
References
navigation along aquaculture net pens," Aquacultural Engineering, vol. 74, pp. 143-156, 2016.
[2] M. Bjerkeng et al., "ROV Navigation in a Fish Cage with Laser-Camera Triangulation," Journal of Marine Science and Engineering, vol. 9, no. 1, p. 79, 2021.
[3] M. Candeloro, A. J. Sørensen, S. Longhi, and F. Dukan, "Observers for dynamic positioning of ROVs with experimental results," IFAC Proceedings Volumes, vol. 45, no. 27, pp. 85-90, 2012.
[4] Taxonomy and Definitions for Terms Related to Driving Automation Systems for On-Road Motor Vehicles, S. International, 2018.
[5] H. B. Amundsen, "Robust Nonlinear ROV Motion Control for Autonomous Inspections of Aquaculture Net Pens," NTNU, 2020.