DIGITAL TWINS OF FISH FARMS – RECENT DEVELOPMENTS IN MODELING AND SENSOR DATA INTEGRATION
Introduction
Fish farming at exposed locations is demanding with respect to personnel safety
, structural integrity and fish welfare during operations
. Operations in and around fish farms are often performed with a limited knowledge of how the environmental conditions at the specific site, e.g., waves
and ocean currents, affects the structures at the fish farm. This reduced insight into the effect of the environmental conditions and the missing ability to properly assess the situation beforehand and while on site, narrows the operational window of potentially crucial tasks such as well-boat and de-lousing operations. Large volumes of data are gathered from fish farms , but the usage of this data is limited. This abstract
presents recent developments in the use of sensor data from fish farms . Measurements from sensors located on a fish cage structure are integrated with a mathematical model of a fish cage, giving a holistic representation of structures and environments during operations. This digital twin of the fish cage can provide unique insight into the structural deformations happening below the surface, and as such function as a decision support tool for fish farmers and service providers.
Materials and methods
The digital twin model is developed in the software FhSim , a simulation environment featuring a large collection of mathematical models, including aquaculture net cages, closed containment systems, fish behaviour, underwater vehicles
and more
. The main components of the model consist of a net structure model, a cable and mooring lines model, a floating collar model and a hydrodynamic environment model. The models need to be numerically efficient in order to run in real-time .
An integrated numerical model with adaptive flow field [3] is used to estimate net-cage deformations, where the magnitude and direction of the current flow can be adapted by continuously assessing deviations between the simulated and the measured positions of the net. The integ rated modelling and estimation approach is well suited for real-time monitoring of cage deformations by using a significantly reduced number of sensors.
The mooring lines, bridles, chains, ropes and cables of the cage system are modelled as collections of six degree of freedom rigid-bar elements which are connected with axial and angular constraints to provide desired structural properties (i.e., bending, axial stiffness and torsional stiffness). An elastic version of the Baumgarte stabilization method [4,5 ] is used t o avoid numerical instabilities in the cable endpoints when simulating at larger time-steps (which is necessary for real-time implementations).
Similar to the cables and mooring lines, the floating collar is modelled as a collection of rigid-bar elements connected with axial and angular constraints, regulated by the implemented Baumgarte stabilization method . The end points of each element are connected through constraints to create a ring. The vertical displacements of the floating collar, caused by wave excitation forces and the forces applied on the floating collar from attached objects such as the net and bridles, are derived from accelerometer data from the floating collar. This enables the floating collar to exhibit vertical displacements based on measurements while retaining horizontal behaviour based on input forces . To enable real-time implementations of the vertical displacements a cubic spline approximation of the collar’s motion is implemented.
FhSim contains implementations of sea environments simulating ocean currents and wave fields, both regular and irregular. The sea environment supports realization of JONSWAP and ISSC wave spectra. An environmental model allowing updates of currents and wave parameters based on sensor inputs was specifically developed for the digital twin model.
Results
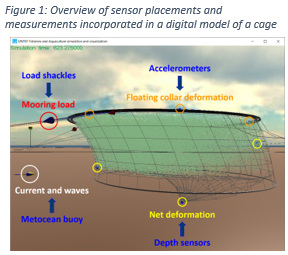
Data from load shackles, depth sensors, accelerometers, and a metocean buoy was gathered from a live fish farm in Norway during a 6-month period running from October 2019 to March 2020. This data was integrated in the digital twin model. Prior to integration the data was processed, and a time-period of two days was chosen to be used in the demo case. Data from 6 load shackles were used to estimate the mooring loads , only 3 depth sensor measurements were necessary to accurately estimate the net deformation, while the cubic spline approximation used for the floating collar estimation required measurements from 8 accelerometers
to give an accurate result. The metocean buoy data were combined with depth sensor data to estimate the current speed. The variables of the simulated numerical models converged to the measured values, demonstrating the capabilities of the digital twin model.
Conclusion and future work
This work has demonstrated how numerical models can be used to accurately represent structures at fish farms using data collected by sensors. The numerical models are lean and efficient and thus suitable for real-time applications. The real-time capabilities of the floating collar model have been tested in a small-scale experiment using one accelerometer
, but
a remaining full-scale test is yet to be performed . Combining IMU data of ship motions with the developed models offers a possibility to monitor vessel operations near the cages. A fish behaviour model (as seen in
) and the corresponding sensor (e.g., echo-sounders ) data will also be tested and included in the digital twin for monitoring fish distribution.
References
[1] K.-J. Reite et al., "Fhsim—time domain simulation of marine systems," in ASME 2014 33rd International Conference on Ocean, Offshore and Arctic Engineering, 2014: American Society of Mechanical Engineers Digital Collection.
[2] B. Su et al., "A multipurpose framework for modelling and simulation of marine aquaculture systems," in ASME 2019 38rd International Conference on Ocean, Offshore and Arctic Engineering, 2019: American Society of Mechanical Engineers Digital Collection.
[3] B. Su et al., "An integrated approach for monitoring structural deformation of aquaculture net cages," Ocean Engineering, vol. 219, pp. 108424[4]
[4] J. Baumgarte, 1972. "Stabilization of constraints and integrals of motion in dynamical systems". Computer Methods in Applied Mechanics and Engineering, 1, pp. 1–16.
[5] V. Johansen, 2007. "Modelling of flexible slender systems for real-time simulations and control applications". PhD Thesis, Norwegian University of Science and Technology, Norway.